Calculate Rotation Matrix From Euler Angles
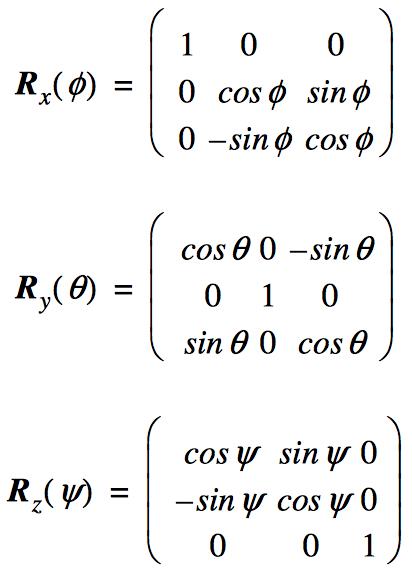
Eul rotm2eul rotm converts a rotation matrix rotm to the corresponding Euler angles eul. Rotation about the x-axis by angle is R x 2 6 6 6 4 1 0 0 0 cos sin 0 sin cos 3 7 7 7 5 1 where 0 indicates a counterclockwise rotation in the plane x 0.
Nmr Ramblings Klaus Eichele
Rotm eul2rotm eul converts a set of Euler angles eul to the corresponding rotation matrix rotm.

Calculate rotation matrix from euler angles. When sinb 1 all that can be inferred from the matrix is the difference a c. The default order for Euler angle rotations is ZYX. Right-handed coordinate system with right-handed rotations.
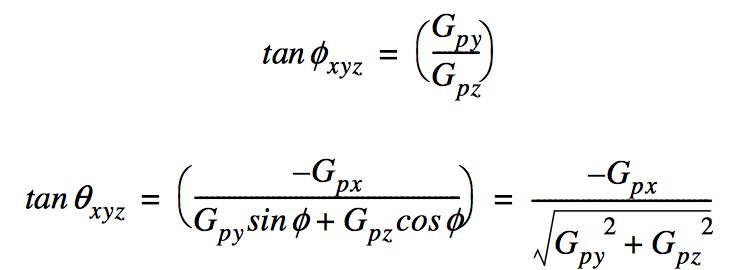
Given a rotation matrixR we can compute the Euler anglesψθ andφby equating each element inRwith the corresponding element in the matrixproductRzφRyθRxψ. The result is the matrix for the completerotation. Angle nprandomuniformlow00 high2 nppi x npcosangle r y npsinangle r x centre_x y centre_y return x y def normx.
1 by angle β. About the z-axis each rotation being applied about one of the world axes as opposed to one of the body axes. Gimbal lock occurs when the pitch angle is 90 or -90.
Note that in both cases multiple a c pairs will yield the same matrix. Mat I Mateye33 shouldBeIdentitytype. V_wRcdot v_b where R is formed by multiplying simpler rotation matrices like this.
Calculate the cross product of your vectors v a x b. Rotations about the coordinate axes are easy to de ne and work with. Rotate around transformed X1 axis X on Fig.
By computing the dot product you can get the cosine of the angle you should rotate with cos angledot ab length alength b and with acos you can uniquely determine the angle Archie thanks for pointing out my earlier mistake. For example rotate pi8225 around the x axis so that the euler angles are PhiThetaPsi2250 0 Now rotate around the new y green axis in 10 degree steps a few times. There are several methods to compute the axis and angle from a rotation matrix see also axisangle.
201 0302 7B6 0 0 1321 312323230 001 00 1 00 0 1. Checks if a matrix is a valid rotation matrix. The input rotation matrix must be in the premultiply form for rotations.
Finding two possible angles. In Euler angles the each rotation is imagined to be represented in the post-rotation coordinate frame of the last rotation Rzyx Rz Ry Rx ZYX Euler Angles roll pitch yaw In Fixed angles all rotations are imagined to be represented in the original fixed coordinate frame. The Euler angles are implemented according to the following convention see the main paper for a detailed explanation.
Tana c a21 a22 in this case of gimbal lock. Now suppose we are given a matrix and are required to extract Euler angles corresponding to the above rotation sequence ie. Axis x y z Angle radians Axis with angle magnitude radians Axis x y z.
Euler angles of multiple axis. Bool isRotationMatrixMat. For more details on Euler angle rotations see Euler Angles.
The common transformation task using Euler angles consists of 3 ZZ1rotations Fig. Return normI shouldBeIdentity 1e-6. Instead of performing the three multiplications of a vector by a matrix we can multiplythe matrices for the three Euler angles together.
V gives the axis of rotation. Rotate around Z1 axis local coordinate system LCS by angle α. Import numpy as np import matplotlibpyplot as plt def get_random_ar 3 centre_x 5 centre_y 5.
In general the number of euler angles in dimension D is quadratic in D. This can be written with etc. Since any one rotation consists of choosing two dimensions to rotate between the total number of rotations available in dimension is which for yields.
See the picture the bolded coordinate system is the. Mat shouldBeIdentity Rt R. The observer is assumed to be positioned on the side of the plane with x0 and looking at the origin.
When sinb 1 the matrix becomes 0 0 1 sina c cosa c 0 cosa c sina c 0. If I have a 3D vector specified in the body coordinate system v_b and I want to express it in the world coordinate system v_w I use a rotation matrix like this. Calculates rotation matrix to euler angles The result is the same as MATLAB except the order of the euler angles x and z are swapped.
The default order for Euler angle rotations is ZYX. When using the rotation matrix premultiply it with the coordinates to be rotated as opposed to postmultiplying. Return x normx def rotate_A_onto_Bvector_a vector_b.
ZYX Euler angles can be thought of as. Rotation order is yaw pitch roll around the z y and x axes respectively. R R_xtheta_rR_ytheta_pR_ztheta_y.
Return npsqrtx0 2 x1 2 def normalize_vectorx. This results in nine equations that can be used tofind the Euler angles. Rotate around transformed Z1 axis by angle.
Every rotation in three dimensions is defined by its axis a vector along this axis is unchanged by the rotation and its angle the amount of rotation about that axis Euler rotation theorem. X y z w real part Axis-angle.
3d Coordinate Rotation Using Roll Pitch Yaw Mathematics Stack Exchange
Nmr Ramblings Klaus Eichele
3 Dcm Properties Rigid Body Kinematics I Coursera

Facial Pose Estimation 1 Understanding Of Euler Angles Programmer Sought
Https Www Fsdeveloper Com Forum Attachments Euler And Quaternion Rotation 11 Pdf 26886

Texture Components And Euler Angles Part 2 June Ppt Video Online Download
Nmr Ramblings Klaus Eichele

Facial Pose Estimation 1 Understanding Of Euler Angles Programmer Sought

Euler Angles Rotation Matrix Quaternion Universal Deadlocks Programmer Sought
Euler Angles

Euler Angles Rotation Matrix Quaternion Universal Deadlocks Programmer Sought
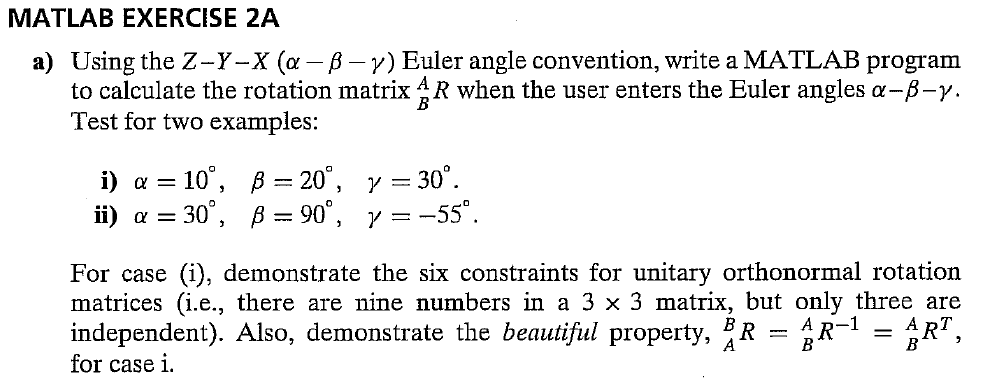
Using The Z Y X Alpha Beta Gamma Euler Angle Chegg Com

Tensors And Rotations In Nmr Mueller 2011 Concepts In Magnetic Resonance Part A Wiley Online Library
Quaternion To Yaw Pitch Roll Stack Overflow
Euler Angles
Euler Angles

Facial Pose Estimation 1 Understanding Of Euler Angles Programmer Sought

3d Coordinate Rotation Using Roll Pitch Yaw Mathematics Stack Exchange
Nmr Ramblings Klaus Eichele